
In semester 1, the connectivity team has mainly been working on the integration between the Cohda On-Board Unit (OBU) and the rest of the system so that the wireless channel can be used to send and receive vehicle data.
This has been challenging as work had to be done remotely, making debugging especially tough and tricky.

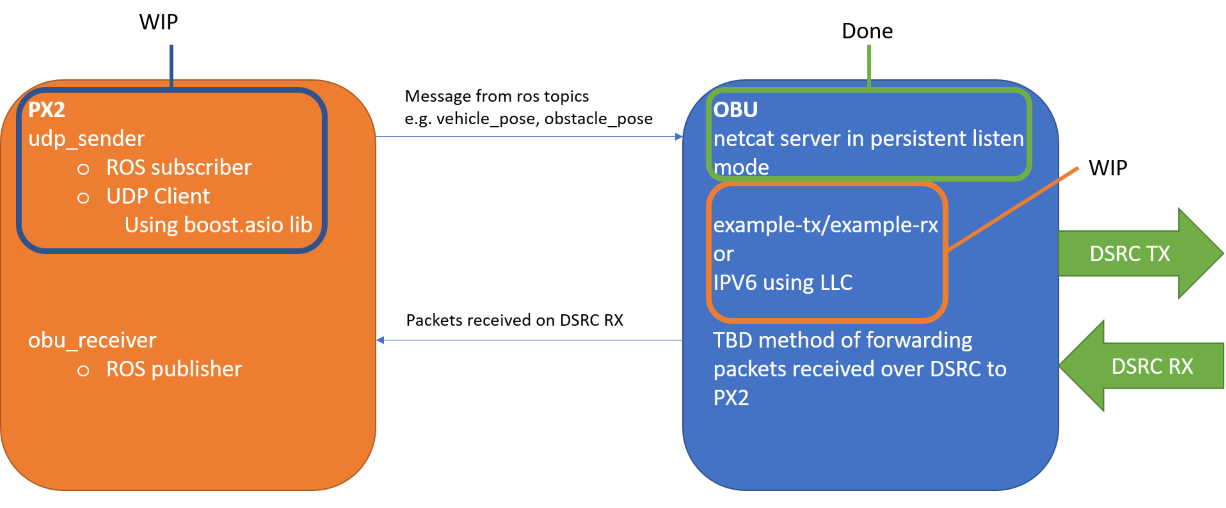
We have been able to send data over the wireless channel by forwarding packets that have been received on a specific port. In testing, these packets were generated on the OBU.
Another team has developed a program that can subscribe to a ROS topic and send the contents of ROS messages to a specific IP address and port using a UDP connection.
We had originally planned to combine the two applications at the start of semester two but the end of year goal will now be a simulation as lockdown has been extended.
The focus for semester 2 is now completely on the intersection control application for vehicles to negotiate right-of-way at intersections, as well as sharing data about “hidden” obstacles between vehicles. The ideation and planning of the intersection control program has been completed at the end of semester one and development will begin at the start of semester two.